
Visual-Inertial SLAM for AUVs
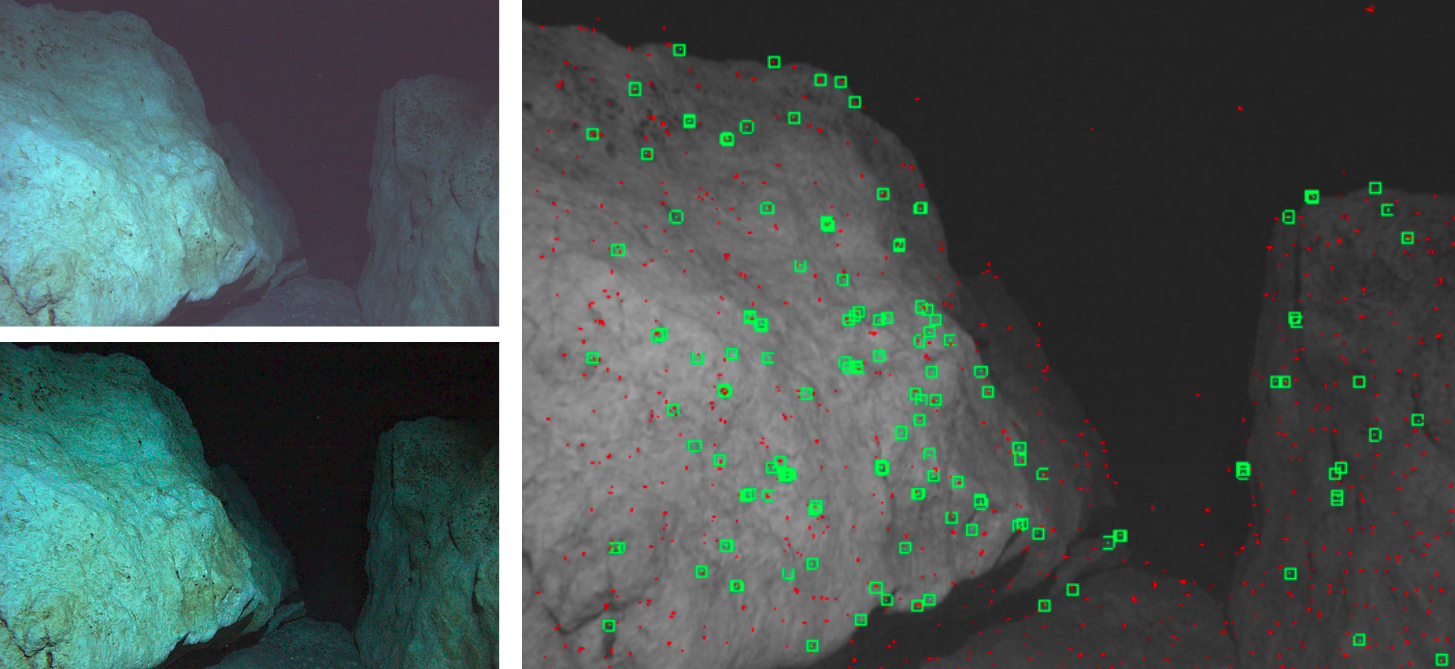
Underwater visual odometry poses several challenges due to attenuation of light, reflections, suspended particles, poor features, absence of GPS, inability to use LIDARs, etc. A light-transmission based image enhancement pipeline was developed in this project to eleminate degradations in underwater visual data and improve the performance of SLAM & VIO systems with underwater robots.
The method was tested on several open source visual inerial datasets from a vareity of underwater environments, with ORB SLAM3 (and partly with ROVIO and OKVIS).

This project was done as an Undergraduate Thesis in Spring 2020, with the Autonomous Robots Lab in University of Nevada, Reno (now in NTNU), under the guidance of Prof. Kostas Alexis.